💻 Artificial Intelligence and Machine Learning Projects
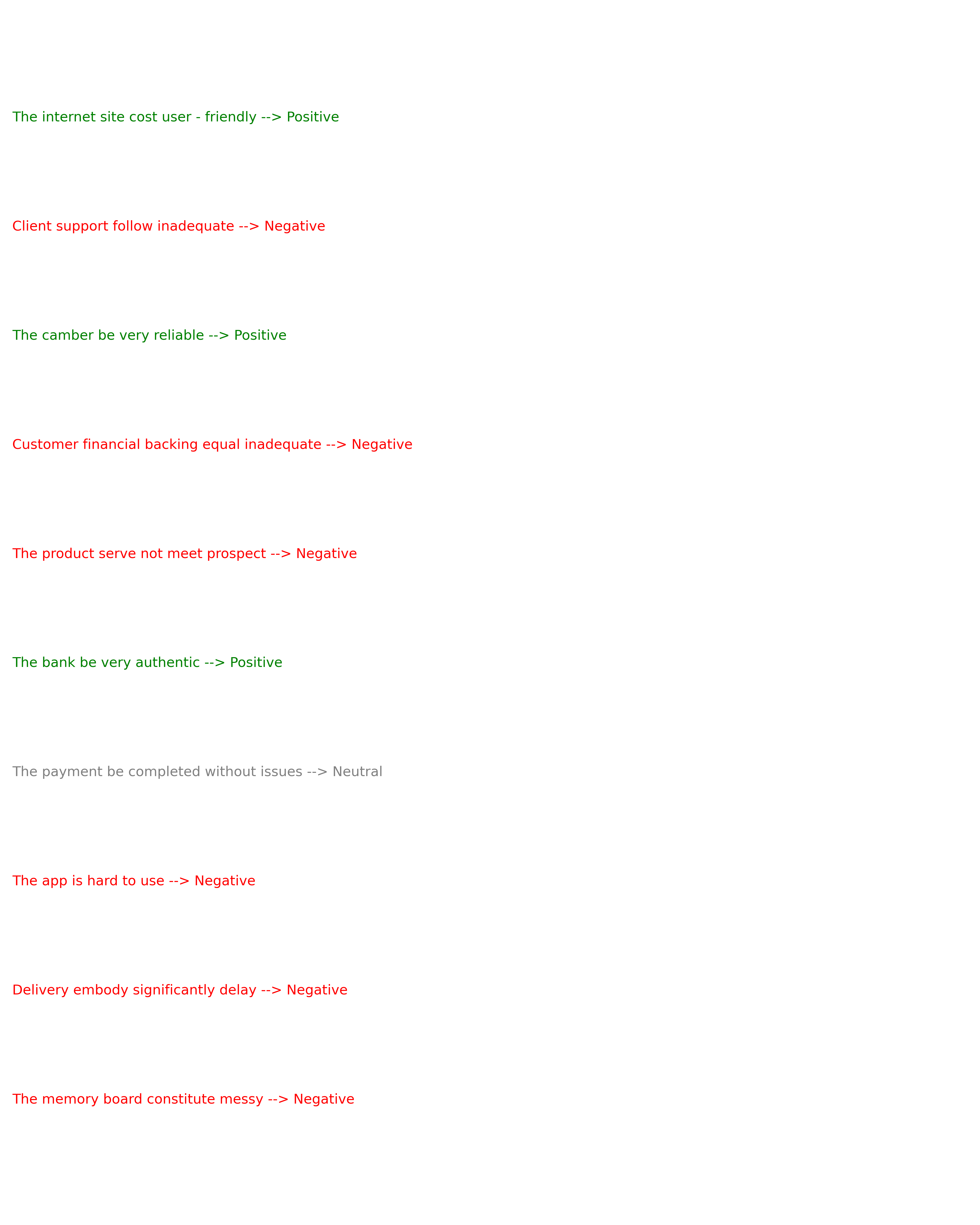
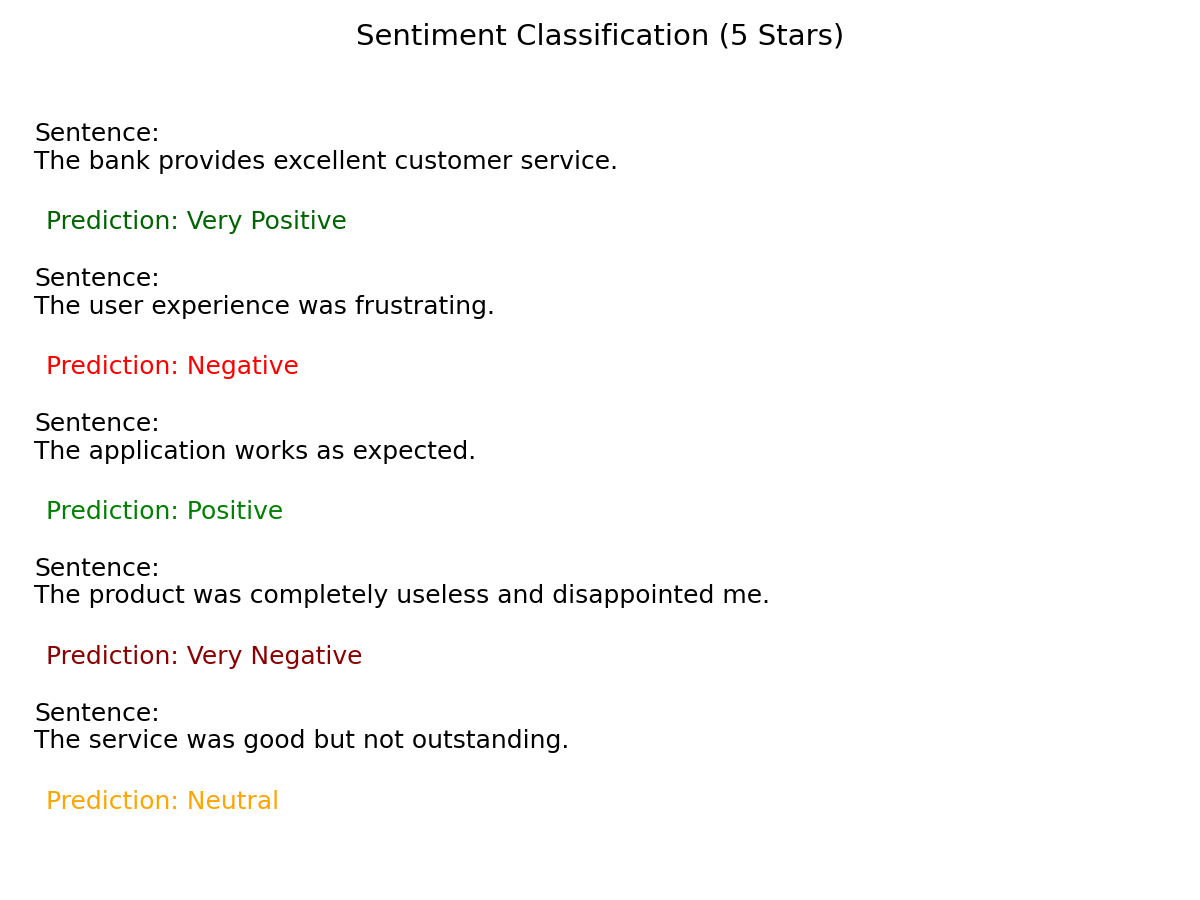
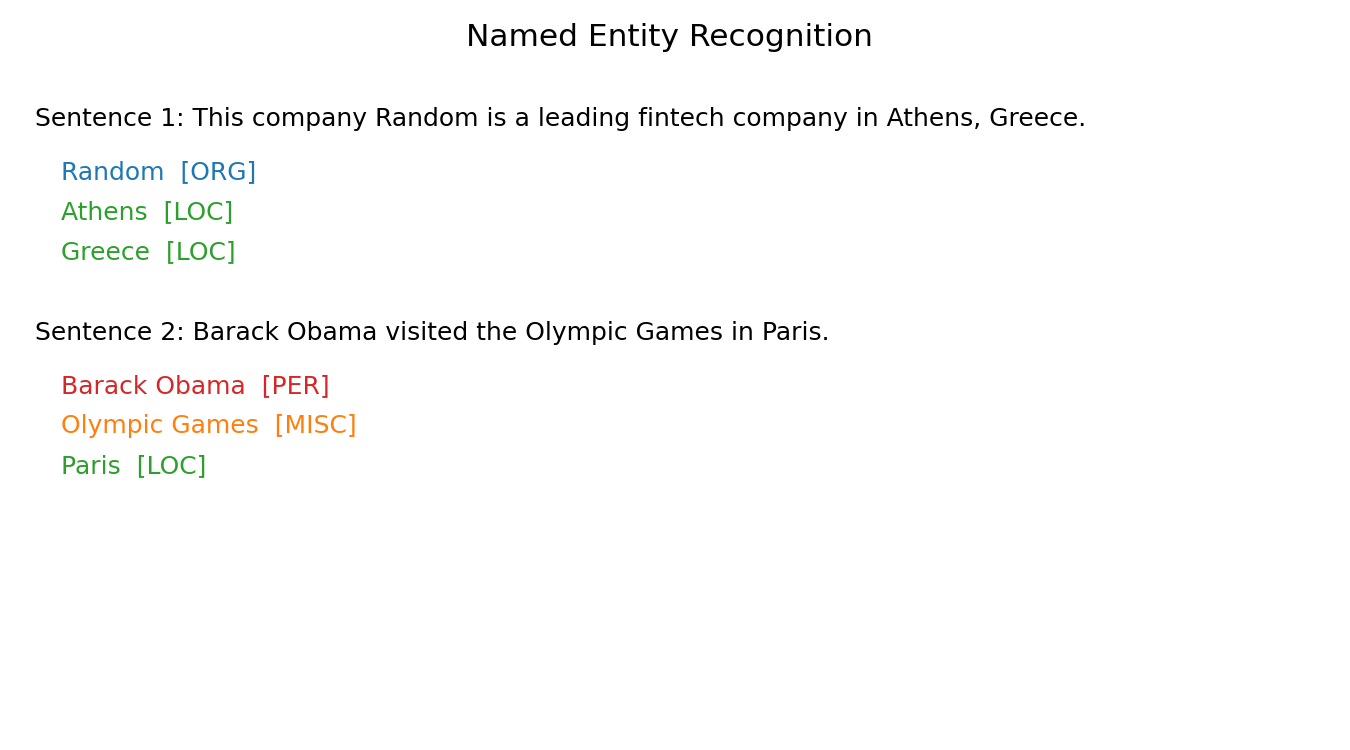
📄 NLP Projects with BERT, LLMs & Hugging Face (2025)
Abstract:
Python NLP projects using BERT, LLMs, and Hugging Face for multilingual text classification,
NER, generation, and sentiment analysis.
Description:
Python projects for NLP tasks using BERT and LLM models. Includes text classification,
named entity recognition, text generation, sentiment analysis, and data augmentation
examples for Greek and English language processing.
PERSONAL GITHUB - NLP_BERT_LLM
PERSONAL GITHUB - NLP_BERT_TF
📄NLP-LLM Text Processing Pipeline for English and Greek (2024-2025)
Abstract:
A Python NLP pipeline for preprocessing English and Greek PDFs for ML and deep learning workflows.
Description:
Preprocess text documents (PDFs) using Python NLP libraries. Extract text with pdfplumber, tokenize with NLTK and SpaCy, remove Greek stopwords, and optionally handle punctuation. Includes scripts and folder structure for preparing datasets for machine learning or deep learning NLP workflows.
PERSONAL GITHUB - NLP_Preprocess_Documents
🌊OceanVoyagerAI-Predicting Trajectories with VAE and Directed-Info GAIL 🚢 (2025)
Abstract:
Description:
An imitation learning algorithm for cargo vessel navigation, combining Variational Autoencoders (VAE) with Directed-Info GAIL, trained on a custom-generated maritime dataset. The system models custom realistic-like vessel trajectories, learning subtask policies for complex navigation scenarios and enabling trajectory prediction under multiple environmental and contextual conditions.
A VAE‑pretrained Directed‑Info GAIL Imitation Learning algorithm (based on Reinforcement Learning) for predicting and generating aircraft and robot trajectories from initial states to final goals, using enriched latent and environmental features to produce complete sequence policies.
Thesis Abstract:
Documentation DOI/Link: http://dx.doi.org/10.26267/unipi_dione/1112
Description:
A research system applying Directed‑Info GAIL to learn trajectory modes and policies for robots and aircraft from unsegmented demonstrations, generating complete trajectories from initial states to final goals.
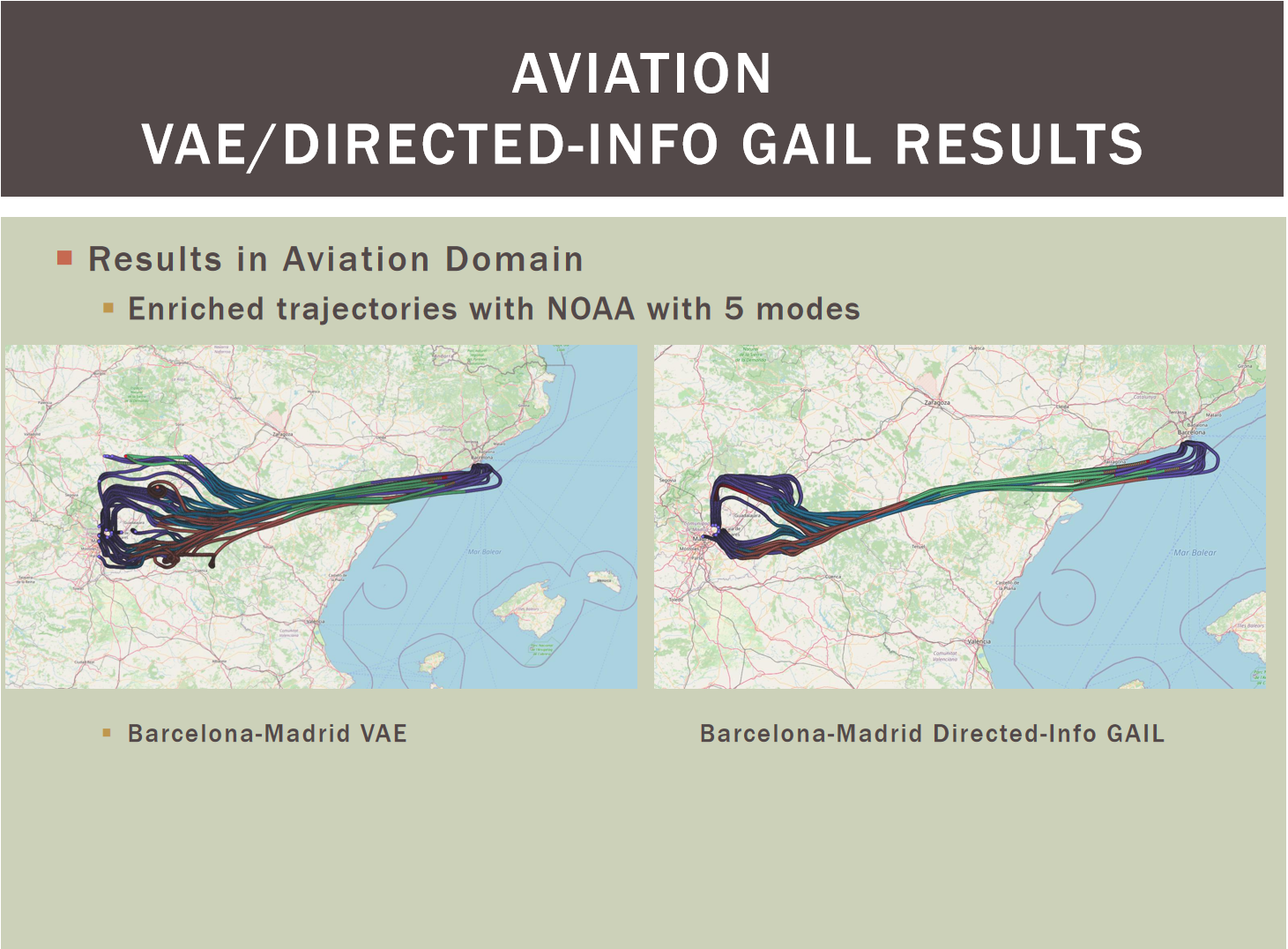
✈️ Aviation Domain:
The model incorporates meteorological features in 3‑latent and 5‑latent variable experiments using real historical flights between Barcelona and Madrid. A Variational Autoencoder (VAE) is used for pre-training to capture latent trajectory modes before feeding into GAIL, which generates full trajectories (~1,000 timestamps) from initial states (longitude, latitude, altitude) to final goal states. Trajectories are visualized in QGIS maps, with different modes color-coded for clarity.
🤖 Robotics Domain:
The system models trajectories for the Hopper robot in OpenAI Gym / MuJoCo, a single-legged hopping robot. Input features include yaw, joint positions and velocities, actuator signals, torso orientation, linear and angular velocities, and contact sensors. A VAE captures latent movement modes before GAIL optimizes the policy. The simulation uses Python for environment interaction, MuJoCo (C/C++) for physics, and OpenGL for 3D rendering. Full trajectories are generated from initial states to motion goals, capturing realistic hopping behaviors over time.
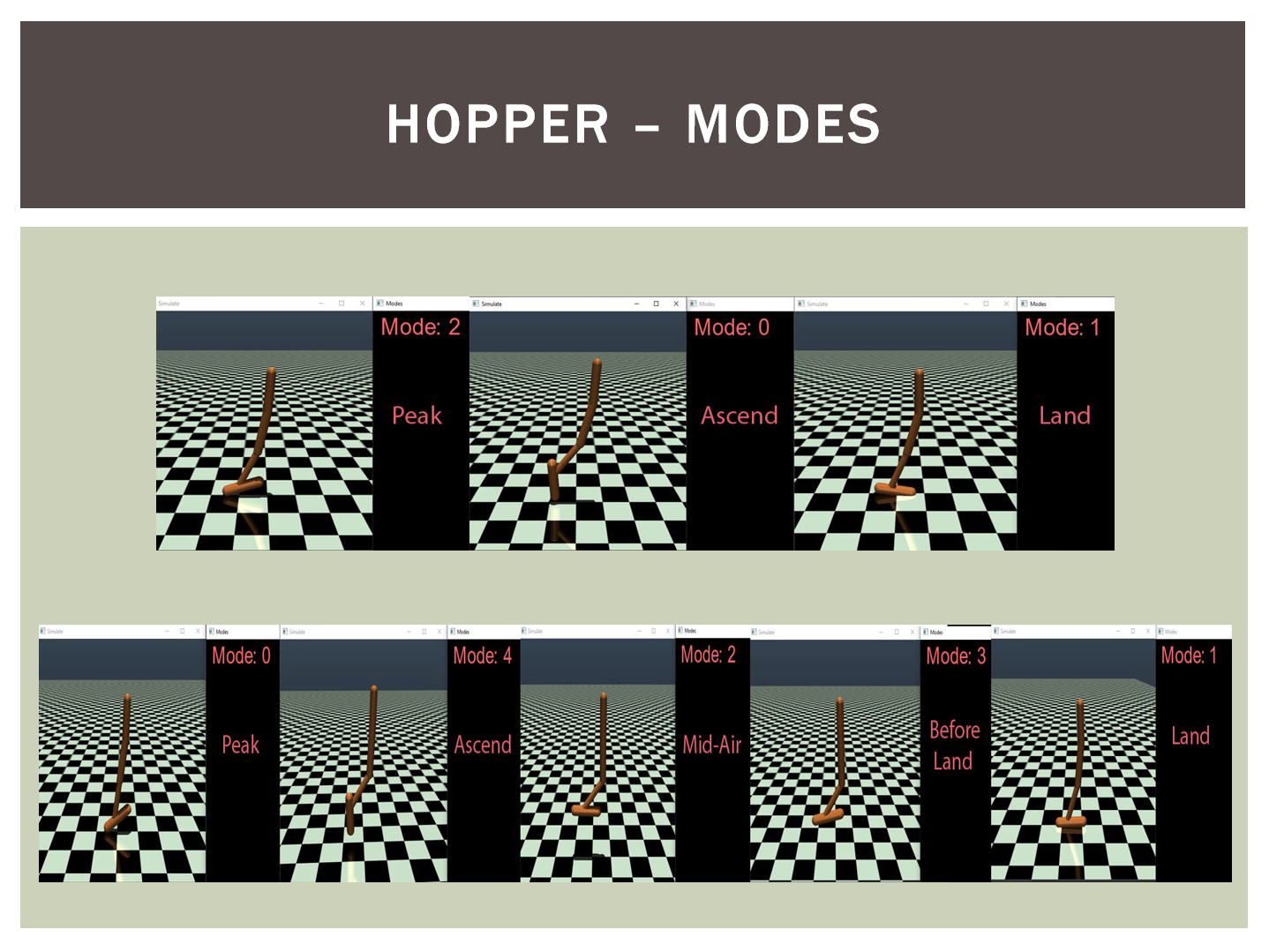
Robot-Leg Hopper using Directed-Info GAIL with 5 MODES
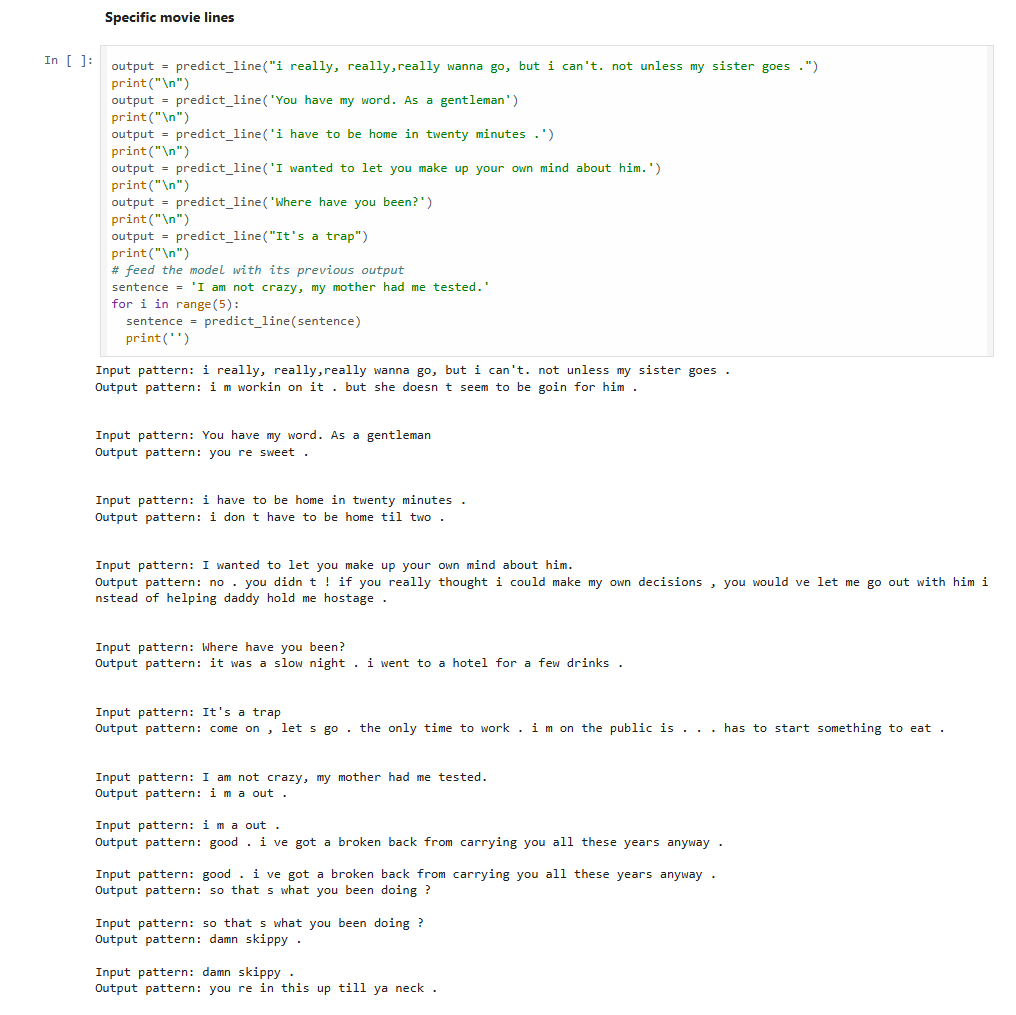
🎬Movie ChatBot (2020)
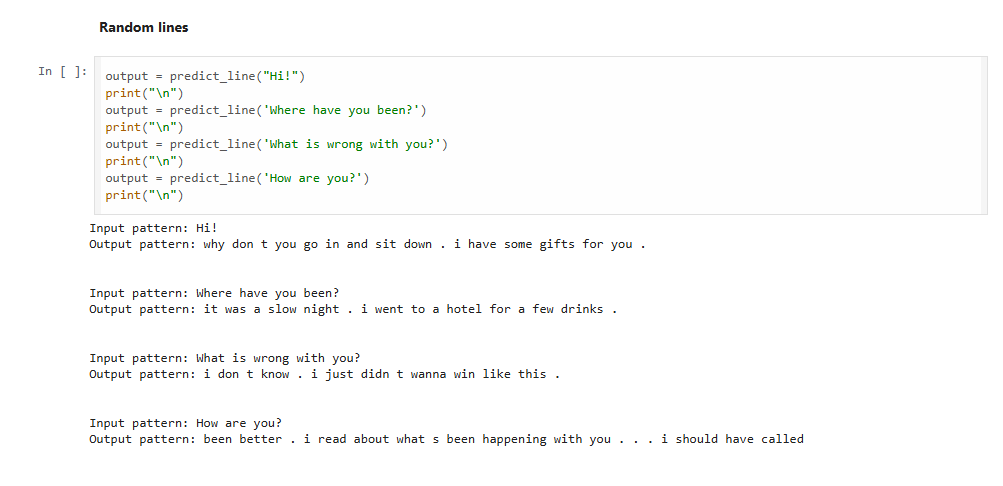
Abstract:A Python TensorFlow chatbot trained on the Cornell Movie‑Dialogs dataset using attention‑RNN, GRU‑RNN and SVM architectures to generate actor‑style responses.
Description:
A Python AI chatbot developed with TensorFlow and NLP, trained on the Cornell Movie‑Dialogs Corpus (pairs of dialogues between two actors) so that if you write a phrase it can respond with a related line from the trained network. Three networks were implemented: a multi‑layer attention RNN (encoder‑decoder with attention), a gated recurrent unit (GRU)‑based RNN, and a simple SVM‑based classifier.
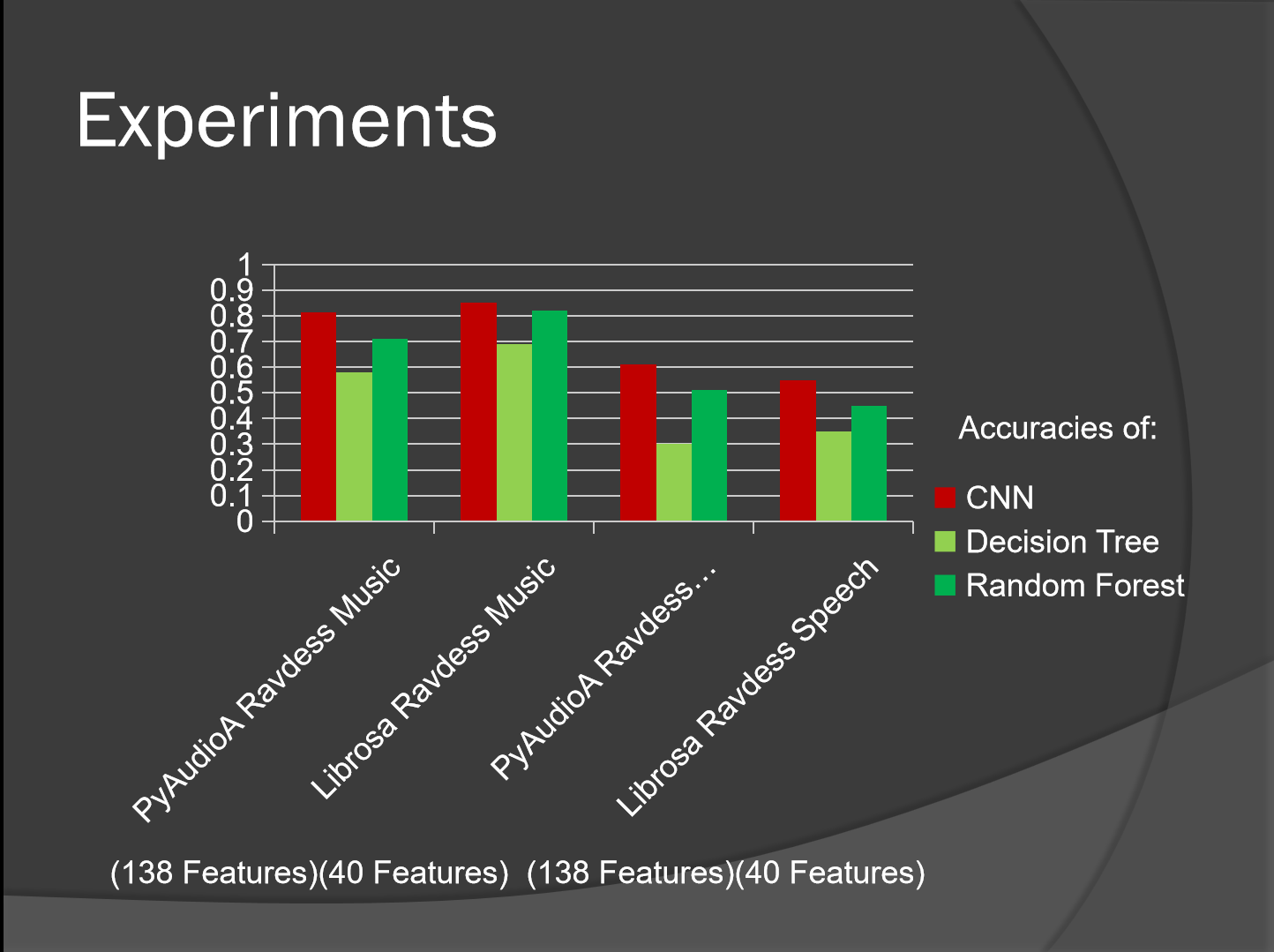
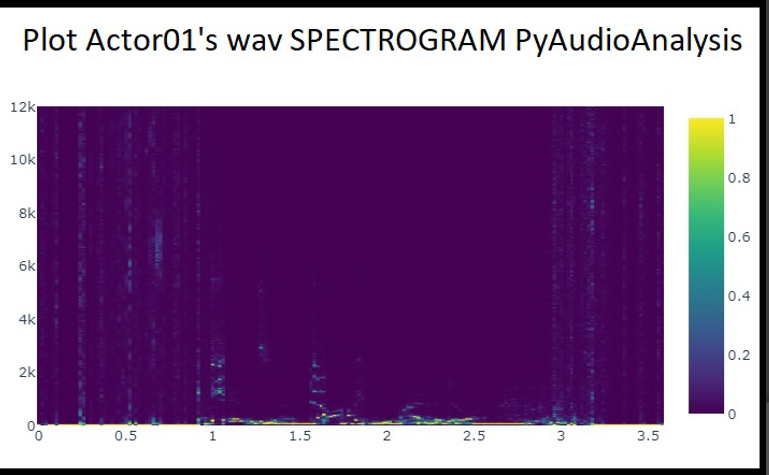
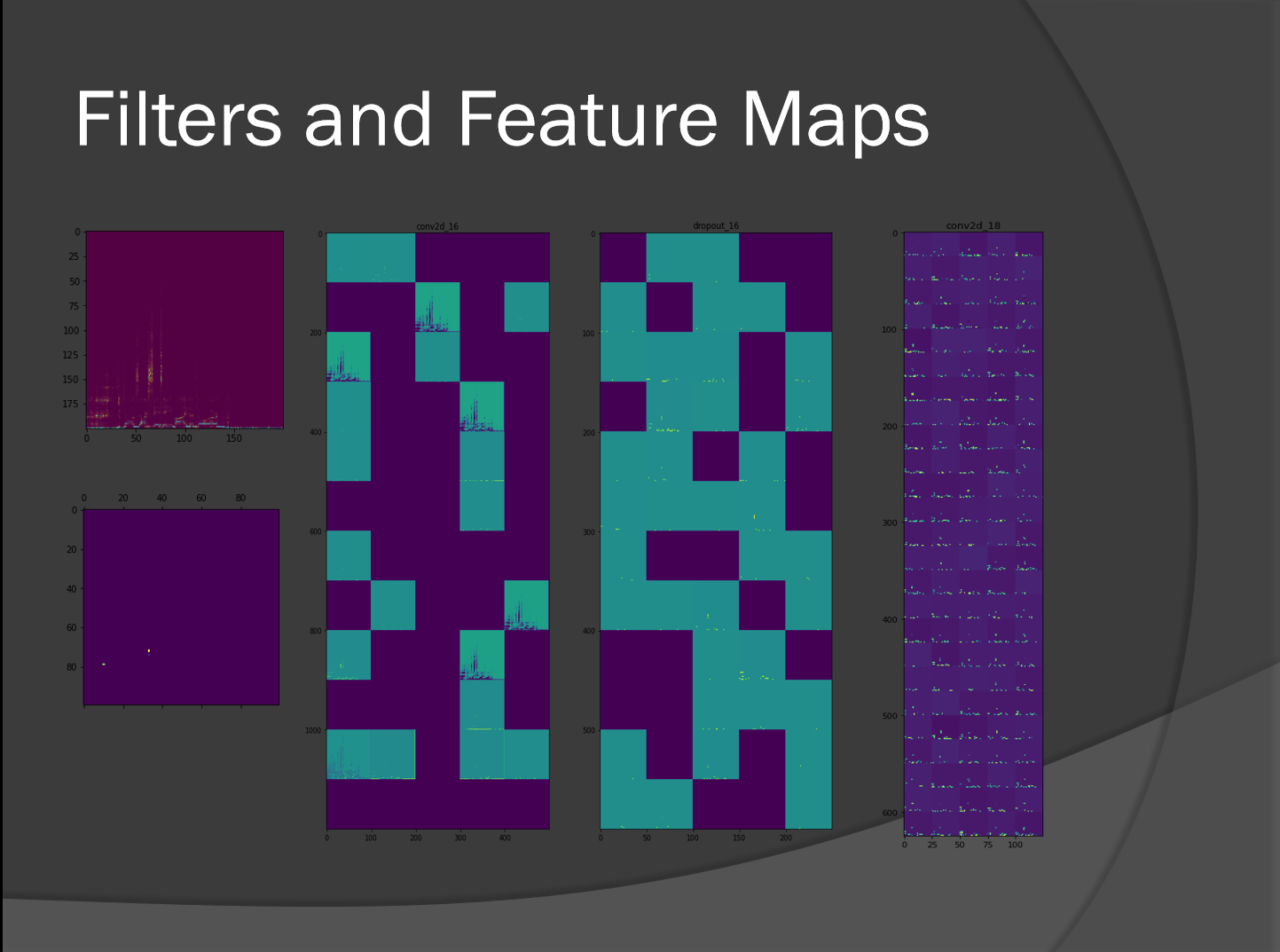
👁️🎵Computer Vision - Audio Analysis Domains (2020) : Emotion Recognition (Image, Music, Video Real-Time)
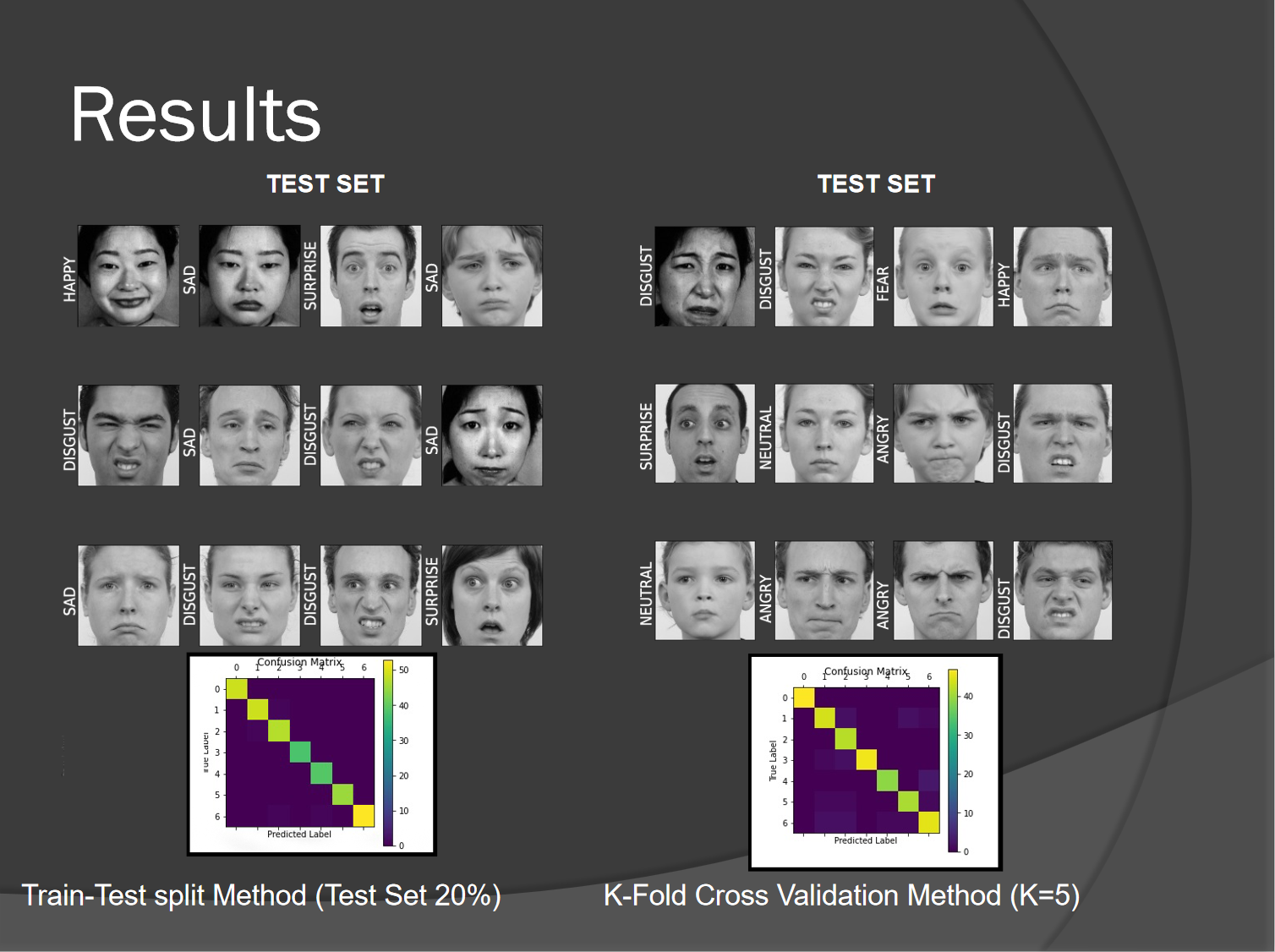
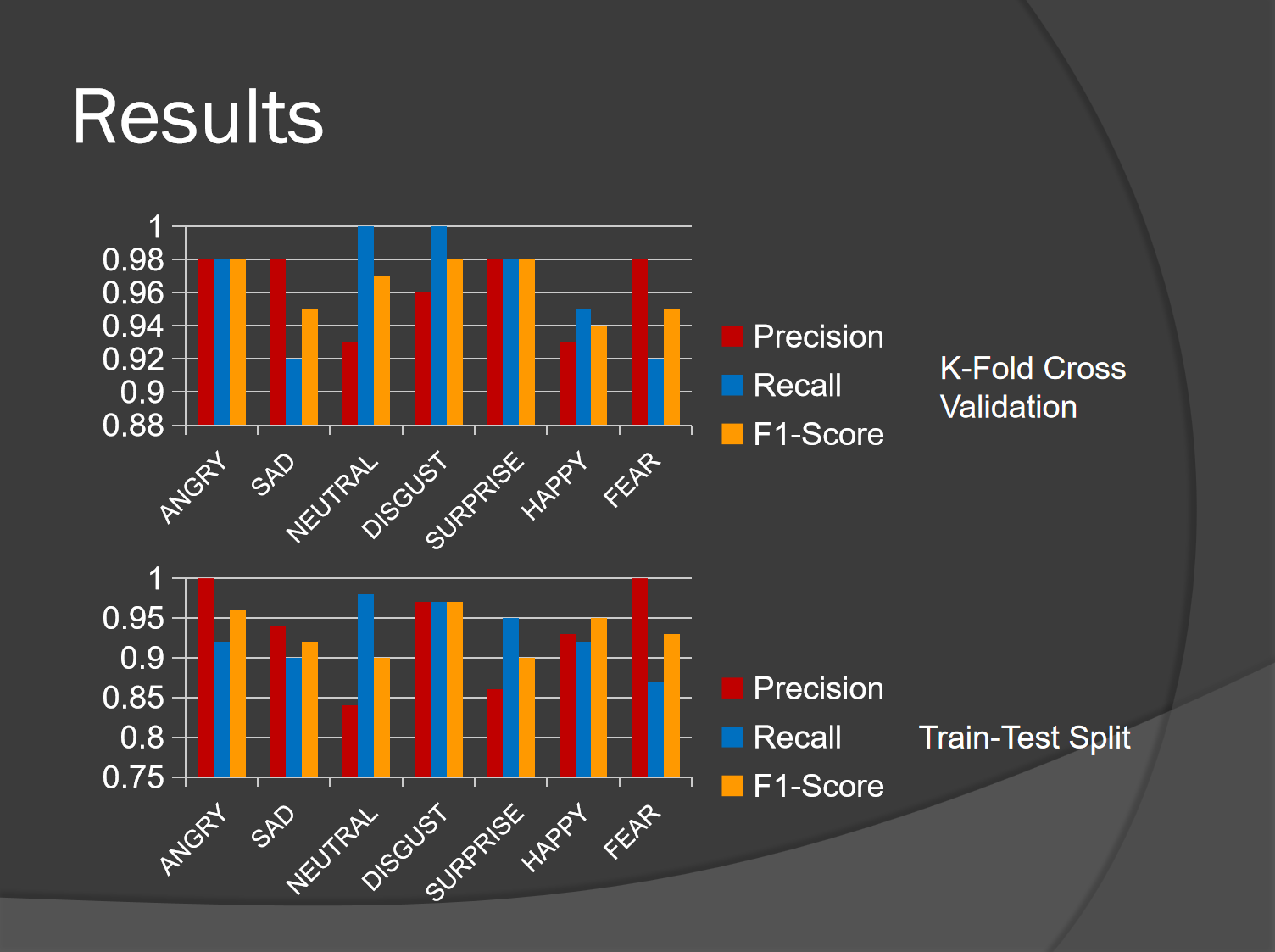
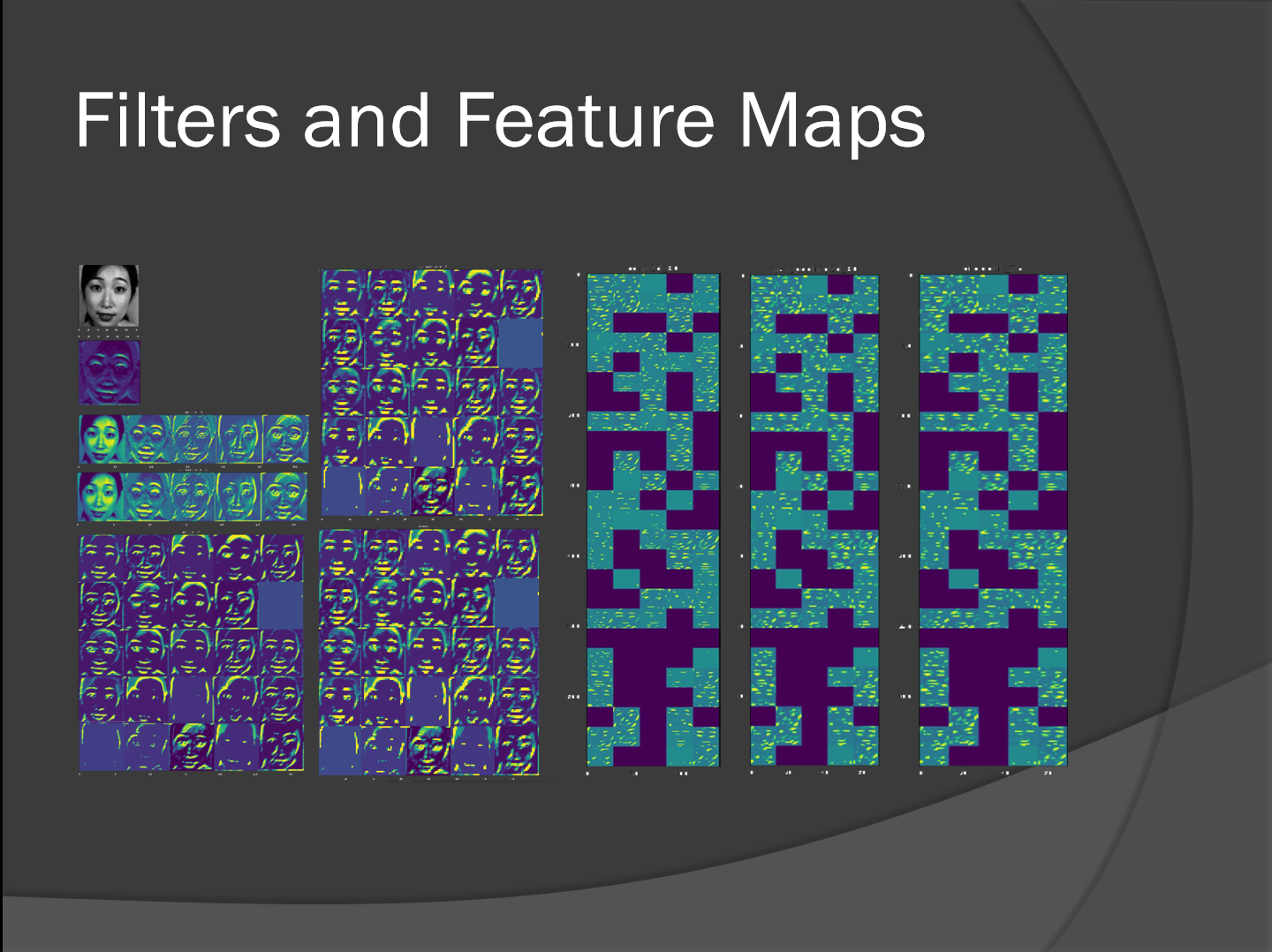
Abstract:A Python AI system combining computer vision (Viola-Jones, JAFFE + RAFD, Augmented) and Audio Analysis (Librosa + PyAudioAnalysis, augmented) with CNN feature extraction, tested in real-time video to recognize seven emotions from images, audio, and live video.
Description:
A Python AI system using TensorFlow and OpenCV to recognize seven distinct emotions from images, music, and real-time video. For the computer vision component, face images were preprocessed using Viola-Jones to detect and crop faces to uniform dimensions, converted to grayscale, and augmented to increase dataset variability; two datasets (JAFFE and RAFD) were merged. For audio analysis, Librosa and PyAudioAnalysis were used to extract emotion from actor-performed phrases, with data augmentation applied to improve generalization. Features were extracted via audio metrics (pitch, frequency, amplitude, timbre, tempo) and spectrogram/mel-spectrogram generation processed with CNNs. Outputs from both networks were combined and tested in real-time video, enabling accurate multi-domain emotion recognition.
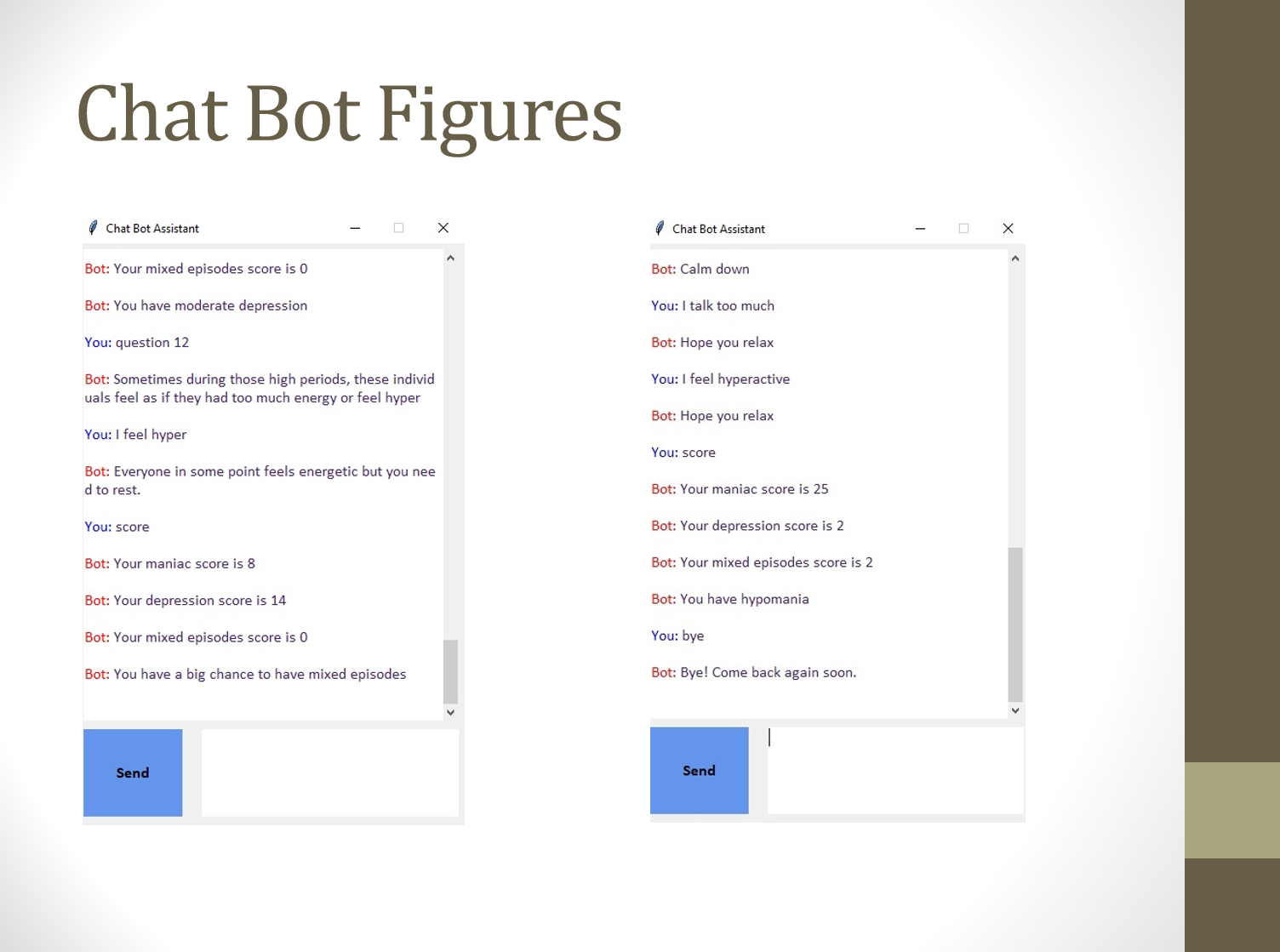
🤖Bipolar ChatBot 💬 (2020)
Abstract:A Python AI chatbot using TensorFlow and NLP with Tkinter GUI, analyzing keyword-tag pairs from patient responses to inform doctors and family of the patient’s bipolar phase.
Description:
A Python AI application developed with TensorFlow and NLP to analyze text and detect the mental state of patients with bipolar disorder, providing real-time notifications to doctors and family members. The system uses pairs of keywords and tags derived from articles and pre-written questions automatically asked to patients. When patients provide extended responses, the keywords and tags are used to evaluate the text with a feed-forward neural network. A scoring metric based on bipolar and depression test articles determines the patient’s current phase, enabling accurate notifications. The application includes a GUI built with Tkinter for user interaction.
Bipolar ChatBot
💻 Cross-Platform Applications and Web Projects with SQL Databases
🏛️Augmented Reality Museum📱 (2018)
Abstract:An AR Android app built with Unity3D and Vuforia that provides interactive museum navigation and educational information on mobile devices.
Description:
An Android Augmented Reality (AR) application designed for mobile phones and tablets to guide visitors through a demo museum. Users can explore exhibits interactively and access contextual information seamlessly. Developed in Unity3D with Vuforia, it demonstrates immersive AR navigation and educational content delivery.
Project Video Link: https://www.dropbox.com/s/q4nj7ddultf0mmh/AR_Museum.mp4?dl=0

📱Augmented Reality Location & NFS Technology (2018)
Abstract:An AR Android app using image markers and NFC technology for indoor navigation and door access in buildings, schools and universities.
Description:
An Android Augmented Reality (AR) application designed for mobiles and tablets, enabling navigation within buildings, universities or schools using image-based markers and NFC technology for newer Android OS versions (2018). NFC is also integrated for door access, combining AR guidance with smart entry control. Developed in Unity3D with Vuforia, it combines AR guidance with NFC-enabled location features to provide precise indoor navigation.
📅Customer Dates (2018)
Abstract:An Android app that saves and retrieves customer orders from a Unity XML-based database and notifies business owners of repeat orders.
Description:
This Android application was developed for business owners to track customer names and order dates. Users can save a customer's name via a text box and button, then load it later by entering the exact same name. The app retrieves the corresponding timestamp of the order from a Unity3D database (similar to XML-based), providing a simple and reliable way to manage customer orders. It also includes a notification system to alert the business owner if the same customer places another order, providing a simple and efficient way to manage repeat customers.

📊ScoreBoard🥋 (2015)
Abstract:A simple PC and mobile app for tracking real-time scores between two martial arts competitors.
Description:
This application was designed to keep the score between 2 players in martial arts competition. Featuring timers, score tracking and on-screen display of penalties for illegal moves.

📀CD Shop (2015)
Abstract:An online CD store built from scratch with HTML, PHP, SQL and Apache, featuring user, admin panels and full order management.
Description:
CD Shop is an online store developed in HTML, PHP and SQL, hosted on Apache and managed using SQLYog for database operations. Built in Adobe DreamWeaver without custom CSS for a BSc university project (2014-2015). It features a user panel, admin panel and order management system handling users, products and orders efficiently.